- Scikit Image – Introduction
- Scikit Image - Image Processing
- Scikit Image - Numpy Images
- Scikit Image - Image datatypes
- Scikit Image - Using Plugins
- Scikit Image - Image Handlings
- Scikit Image - Reading Images
- Scikit Image - Writing Images
- Scikit Image - Displaying Images
- Scikit Image - Image Collections
- Scikit Image - Image Stack
- Scikit Image - Multi Image
- Scikit Image - Data Visualization
- Scikit Image - Using Matplotlib
- Scikit Image - Using Ploty
- Scikit Image - Using Mayavi
- Scikit Image - Using Napari
- Scikit Image - Color Manipulation
- Scikit Image - Alpha Channel
- Scikit Image - Conversion b/w Color & Gray Values
- Scikit Image - Conversion b/w RGB & HSV
- Scikit Image - Conversion to CIE-LAB Color Space
- Scikit Image - Conversion from CIE-LAB Color Space
- Scikit Image - Conversion to luv Color Space
- Scikit Image - Conversion from luv Color Space
- Scikit Image - Image Inversion
- Scikit Image - Painting Images with Labels
- Scikit Image - Contrast & Exposure
- Scikit Image - Contrast
- Scikit Image - Contrast enhancement
- Scikit Image - Exposure
- Scikit Image - Histogram Matching
- Scikit Image - Histogram Equalization
- Scikit Image - Local Histogram Equalization
- Scikit Image - Tinting gray-scale images
- Scikit Image - Image Transformation
- Scikit Image - Scaling an image
- Scikit Image - Rotating an Image
- Scikit Image - Warping an Image
- Scikit Image - Affine Transform
- Scikit Image - Piecewise Affine Transform
- Scikit Image - ProjectiveTransform
- Scikit Image - EuclideanTransform
- Scikit Image - Radon Transform
- Scikit Image - Line Hough Transform
- Scikit Image - Probabilistic Hough Transform
- Scikit Image - Circular Hough Transforms
- Scikit Image - Elliptical Hough Transforms
- Scikit Image - Polynomial Transform
- Scikit Image - Image Pyramids
- Scikit Image - Pyramid Gaussian Transform
- Scikit Image - Pyramid Laplacian Transform
- Scikit Image - Swirl Transform
- Scikit Image - Morphological Operations
- Scikit Image - Erosion
- Scikit Image - Dilation
- Scikit Image - Black & White Tophat Morphologies
- Scikit Image - Convex Hull
- Scikit Image - Generating footprints
- Scikit Image - Isotopic Dilation & Erosion
- Scikit Image - Isotopic Closing & Opening of an Image
- Scikit Image - Skelitonizing an Image
- Scikit Image - Morphological Thinning
- Scikit Image - Masking an image
- Scikit Image - Area Closing & Opening of an Image
- Scikit Image - Diameter Closing & Opening of an Image
- Scikit Image - Morphological reconstruction of an Image
- Scikit Image - Finding local Maxima
- Scikit Image - Finding local Minima
- Scikit Image - Removing Small Holes from an Image
- Scikit Image - Removing Small Objects from an Image
- Scikit Image - Filters
- Scikit Image - Image Filters
- Scikit Image - Median Filter
- Scikit Image - Mean Filters
- Scikit Image - Morphological gray-level Filters
- Scikit Image - Gabor Filter
- Scikit Image - Gaussian Filter
- Scikit Image - Butterworth Filter
- Scikit Image - Frangi Filter
- Scikit Image - Hessian Filter
- Scikit Image - Meijering Neuriteness Filter
- Scikit Image - Sato Filter
- Scikit Image - Sobel Filter
- Scikit Image - Farid Filter
- Scikit Image - Scharr Filter
- Scikit Image - Unsharp Mask Filter
- Scikit Image - Roberts Cross Operator
- Scikit Image - Lapalace Operator
- Scikit Image - Window Functions With Images
- Scikit Image - Thresholding
- Scikit Image - Applying Threshold
- Scikit Image - Otsu Thresholding
- Scikit Image - Local thresholding
- Scikit Image - Hysteresis Thresholding
- Scikit Image - Li thresholding
- Scikit Image - Multi-Otsu Thresholding
- Scikit Image - Niblack and Sauvola Thresholding
- Scikit Image - Restoring Images
- Scikit Image - Rolling-ball Algorithm
- Scikit Image - Denoising an Image
- Scikit Image - Wavelet Denoising
- Scikit Image - Non-local means denoising for preserving textures
- Scikit Image - Calibrating Denoisers Using J-Invariance
- Scikit Image - Total Variation Denoising
- Scikit Image - Shift-invariant wavelet denoising
- Scikit Image - Image Deconvolution
- Scikit Image - Richardson-Lucy Deconvolution
- Scikit Image - Recover the original from a wrapped phase image
- Scikit Image - Image Inpainting
- Scikit Image - Registering Images
- Scikit Image - Image Registration
- Scikit Image - Masked Normalized Cross-Correlation
- Scikit Image - Registration using optical flow
- Scikit Image - Assemble images with simple image stitching
- Scikit Image - Registration using Polar and Log-Polar
- Scikit Image - Feature Detection
- Scikit Image - Dense DAISY Feature Description
- Scikit Image - Histogram of Oriented Gradients
- Scikit Image - Template Matching
- Scikit Image - CENSURE Feature Detector
- Scikit Image - BRIEF Binary Descriptor
- Scikit Image - SIFT Feature Detector and Descriptor Extractor
- Scikit Image - GLCM Texture Features
- Scikit Image - Shape Index
- Scikit Image - Sliding Window Histogram
- Scikit Image - Finding Contour
- Scikit Image - Texture Classification Using Local Binary Pattern
- Scikit Image - Texture Classification Using Multi-Block Local Binary Pattern
- Scikit Image - Active Contour Model
- Scikit Image - Canny Edge Detection
- Scikit Image - Marching Cubes
- Scikit Image - Foerstner Corner Detection
- Scikit Image - Harris Corner Detection
- Scikit Image - Extracting FAST Corners
- Scikit Image - Shi-Tomasi Corner Detection
- Scikit Image - Haar Like Feature Detection
- Scikit Image - Haar Feature detection of coordinates
- Scikit Image - Hessian matrix
- Scikit Image - ORB feature Detection
- Scikit Image - Additional Concepts
- Scikit Image - Render text onto an image
- Scikit Image - Face detection using a cascade classifier
- Scikit Image - Face classification using Haar-like feature descriptor
- Scikit Image - Visual image comparison
- Scikit Image - Exploring Region Properties With Pandas
Assemble Images with Simple Image Stitching
Image stitching is a fundamental task in computer vision and image processing, allowing us to seamlessly combine multiple images into a single, larger composite image. This process is particularly useful when we assume rigid body motions, such as translations and rotations, between the images.
In this tutorial, we will explore the step-by-step process of assembling images under the assumption of rigid body motions. We'll cover key aspects of image stitching, including the detection of interest points, matching these points, estimating transformations, and the final step of combining the images to create a single, stitched result.
Example
The following example demonstrates how to perform image registration by matching features in a set of images and applying affine transformations to align them with a reference image.
from matplotlib import pyplot as plt
import numpy as np
from skimage import data, util, transform, feature, measure, filters, metrics
def match_image_locations(image0, image1, reference_coords, candidate_coords, patch_radius=5, gaussian_sigma=3):
y, x = np.mgrid[-patch_radius:patch_radius + 1, -patch_radius:patch_radius + 1]
weights = np.exp(-0.5 * (x ** 2 + y ** 2) / gaussian_sigma ** 2)
weights /= 2 * np.pi * gaussian_sigma * gaussian_sigma
matched_coords = []
for r0, c0 in reference_coords:
patch0 = image0[r0 - patch_radius:r0 + patch_radius + 1, c0 - patch_radius:c0 + patch_radius + 1]
candidate_patches = [image1[r1 - patch_radius:r1 + patch_radius + 1, c1 - patch_radius:c1 + patch_radius + 1] for r1, c1 in candidate_coords]
ssd_list = [np.sum(weights * (patch0 - candidate_patch) ** 2) for candidate_patch in candidate_patches]
matched_coords.append(candidate_coords[np.argmin(ssd_list)])
return np.array(matched_coords)
# Data Generation
reference_image = data.moon()
tilt_angles = [0, 5, 6, -2, 3, -4]
center_coordinates = [(0, 0), (10, 10), (5, 12), (11, 21), (21, 17), (43, 15)]
image_list = [transform.rotate(reference_image, angle=a, center=c)[40:240, 50:350] for a, c in zip(tilt_angles, center_coordinates)]
reference_image_copy = image_list[0].copy()
image_list = [util.random_noise(filters.gaussian(image, 1.1), var=5e-4, rng=seed) for seed, image in enumerate(image_list)]
reference_psnr = metrics.peak_signal_noise_ratio(reference_image_copy, image_list[0])
# Image Registration
min_distance = 5
corners_list = [feature.corner_peaks(feature.corner_harris(image), threshold_rel=0.001, min_distance=min_distance) for image in image_list]
# Use the corners detected in the first image as reference points
reference_image = image_list[0]
reference_coords = corners_list[0]
matched_corners = [match_image_locations(reference_image, image, reference_coords, candidate_coords, min_distance) for image, candidate_coords in zip(image_list, corners_list)]
# Estimate robust relative affine transformations using RANSAC
source = np.array(reference_coords)
transformations = [measure.ransac((destination, source), transform.EuclideanTransform, min_samples=3, residual_threshold=2, max_trials=100)[0].params for destination in matched_corners]
# Display the Results
fig, ax_list = plt.subplots(6, 2, figsize=(6, 9), sharex=True, sharey=True)
for index, (image, transform_params, (axis0, axis1)) in enumerate(zip(image_list, transformations, ax_list)):
axis0.imshow(image, cmap="gray", vmin=0, vmax=1)
axis1.imshow(transform.warp(image, transform_params), cmap="gray", vmin=0, vmax=1)
if index == 0:
axis0.set_title("Tilted Images")
axis0.set_ylabel(f"Reference Image\n(PSNR={reference_psnr:.2f})")
axis1.set_title("Registered Images")
axis0.set(xticklabels=[], yticklabels=[], xticks=[], yticks=[])
axis1.set_axis_off()
fig.tight_layout()
plt.show()
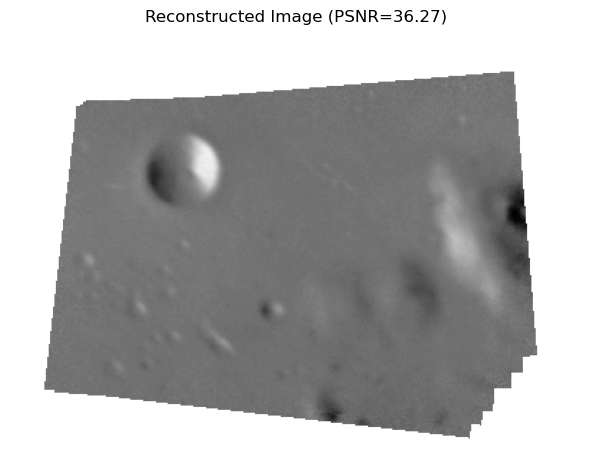
Output
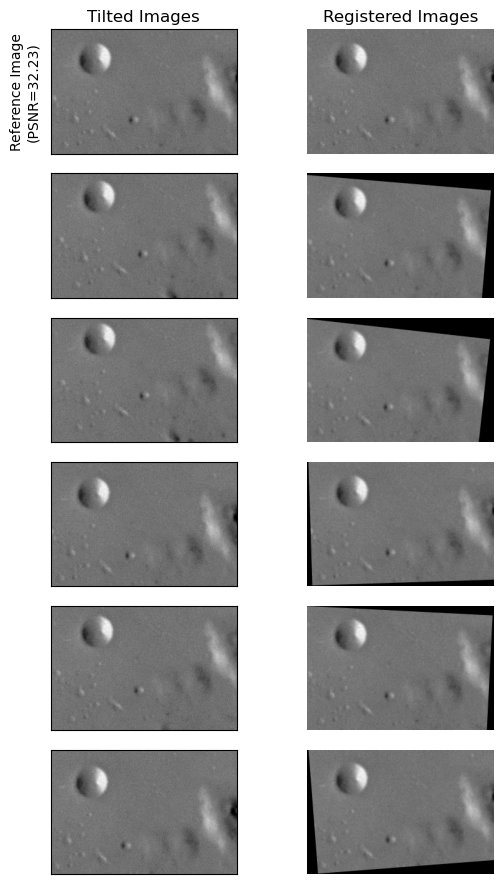
Image assembling
To create a composite image, we position the registered images relative to the reference image within a global domain. We achieve this by defining a global transformation, which essentially relocates the reference image within this global domain through a straightforward translation.
Example
In this continuation of the previous example, we define the margin and output shape for the global transformation. We then apply this transformation to all images in the image_list, creating a global_image_list. A mask is used to identify areas with NaN values, and these areas are set to 1 to avoid NaN artifacts. Finally, a composite image is created by averaging the global image list, and its Peak Signal-to-Noise Ratio (PSNR) is calculated and displayed.
# Define the margin and output shape for global transformation
margin = 50
height, width = image_list[0].shape
output_shape = height + 2 * margin, width + 2 * margin
# Initialize the global transformation matrix as an identity matrix
global_transform = np.eye(3)
global_transform[:2, 2] = -margin, -margin
# Apply global transformation to all images and create a global image list
global_image_list = [transform.warp(image, transformation.dot(global_transform),
output_shape=output_shape,
mode="constant", cval=np.nan)
for image, transformation in zip(image_list, transformations)]
# Create a mask to identify areas with NaN values
all_nan_mask = np.all([np.isnan(image) for image in global_image_list], axis=0)
global_image_list[0][all_nan_mask] = 1.
# Create a composite image by averaging the global image list
composite_image = np.nanmean(global_image_list, axis=0)
composite_psnr = metrics.peak_signal_noise_ratio(reference_image_copy,
composite_image[margin:margin + height,
margin:margin + width])
# Display the reconstructed composite image
figure, axis = plt.subplots(1, 1)
axis.imshow(composite_image, cmap="gray", vmin=0, vmax=1)
axis.set_axis_off()
axis.set_title(f"Reconstructed Image (PSNR={composite_psnr:.2f})")
figure.tight_layout()
plt.show()
Output