- Computer Graphics - Home
- Computer Graphics Basics
- Computer Graphics Applications
- Graphics APIs and Pipelines
- Computer Graphics Maths
- Sets and Mapping
- Solving Quadratic Equations
- Computer Graphics Trigonometry
- Computer Graphics Vectors
- Linear Interpolation
- Computer Graphics Devices
- Cathode Ray Tube
- Raster Scan Display
- Random Scan Device
- Phosphorescence Color CRT
- Flat Panel Displays
- 3D Viewing Devices
- Images Pixels and Geometry
- Color Models
- Line Generation
- Line Generation Algorithm
- DDA Algorithm
- Bresenham's Line Generation Algorithm
- Mid-point Line Generation Algorithm
- Circle Generation
- Circle Generation Algorithm
- Bresenham's Circle Generation Algorithm
- Mid-point Circle Generation Algorithm
- Ellipse Generation Algorithm
- Polygon Filling
- Polygon Filling Algorithm
- Scan Line Algorithm
- Flood Filling Algorithm
- Boundary Fill Algorithm
- 4 and 8 Connected Polygon
- Inside Outside Test
- 2D Transformation
- 2D Transformation
- Transformation Between Coordinate System
- Affine Transformation
- Raster Methods Transformation
- 2D Viewing
- Viewing Pipeline and Reference Frame
- Window Viewport Coordinate Transformation
- Viewing & Clipping
- Point Clipping Algorithm
- Cohen-Sutherland Line Clipping
- Cyrus-Beck Line Clipping Algorithm
- Polygon Clipping Sutherland–Hodgman Algorithm
- Text Clipping
- Clipping Techniques
- Bitmap Graphics
- 3D Viewing Transformation
- 3D Computer Graphics
- Parallel Projection
- Orthographic Projection
- Oblique Projection
- Perspective Projection
- 3D Transformation
- Rotation with Quaternions
- Modelling and Coordinate Systems
- Back-face Culling
- Lighting in 3D Graphics
- Shadowing in 3D Graphics
- 3D Object Representation
- Represnting Polygons
- Computer Graphics Surfaces
- Visible Surface Detection
- 3D Objects Representation
- Computer Graphics Curves
- Computer Graphics Curves
- Types of Curves
- Bezier Curves and Surfaces
- B-Spline Curves and Surfaces
- Data Structures For Graphics
- Triangle Meshes
- Scene Graphs
- Spatial Data Structure
- Binary Space Partitioning
- Tiling Multidimensional Arrays
- Color Theory
- Colorimetry
- Chromatic Adaptation
- Color Appearance
- Antialiasing
- Ray Tracing
- Ray Tracing Algorithm
- Perspective Ray Tracing
- Computing Viewing Rays
- Ray-Object Intersection
- Shading in Ray Tracing
- Transparency and Refraction
- Constructive Solid Geometry
- Texture Mapping
- Texture Values
- Texture Coordinate Function
- Antialiasing Texture Lookups
- Procedural 3D Textures
- Reflection Models
- Real-World Materials
- Implementing Reflection Models
- Specular Reflection Models
- Smooth-Layered Model
- Rough-Layered Model
- Surface Shading
- Diffuse Shading
- Phong Shading
- Artistic Shading
- Computer Animation
- Computer Animation
- Keyframe Animation
- Morphing Animation
- Motion Path Animation
- Deformation Animation
- Character Animation
- Physics-Based Animation
- Procedural Animation Techniques
- Computer Graphics Fractals
Tiling Multi-dimensional Arrays in Computer Graphics
Tiling of multidimensional arrays is one of the key methods to enhance performance. Tiling means optimizing the use of the memory hierarchy by organizing data in such a way that it is accessed more efficiently. Read this chapter to understand the basic concept of tiling, its importance, and how it is applied in both 2D and 3D arrays.
Tiling Multi-dimensional Arrays
Memory is accessed in blocks, and data that is stored closer together is typically accessed faster. In computer graphics, large datasets such as images, volumes, or textures are often represented as multidimensional arrays. A problem may come when these arrays are stored in a poor memory locality formation. Means, adjacent elements in the array are not stored near each other in memory. It can cause performance issues when the system has to jump around in memory to access the necessary data.
Tiling (also known as bricking) solves this problem by breaking the array into smaller blocks or tiles. These tiles are stored contiguously in memory. It makes the access to adjacent data elements faster and more efficient. This technique is particularly useful in modern architectures, where memory hierarchies play a significant role in determining the speed of data access.
Traditional Memory Layout for 2D Arrays
Before understanding the idea of tiling, let us see the traditional memory layout for a 2D array. In a simple 2D array with dimensions Nx × Ny, the data is usually stored as a 1D array. The 2D index (x, y) is mapped to a 1D index using the following formula:
$$\mathrm{\text{Index} \:=\: x \:+\: N_x\: \times\: y}$$
This formula works fine if the system is processing the data row by row. However, if the system needs to process the data column by column, this layout becomes inefficient. In this case, two adjacent elements in a column are separated by Nx elements in memory, which can lead to poor memory locality and cache performance.
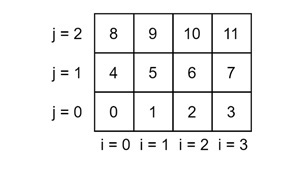
In this example, where an array of size 4 × 3 is stored linearly in memory. Accessing elements in the same row is fast because they are stored next to each other. However, accessing elements in the same column requires jumping over several elements, leading to inefficient memory usage.
Tiling for Better Memory Locality
To solve the problem of poor memory locality, we can divide the array into smaller tiles. Each tile contains a small block of the array, and these tiles are stored contiguously in memory. This ensures that when the system accesses data within a tile, it does so efficiently.
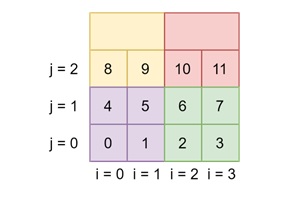
For example, here in tiled layout of the same 4 × 3 array, where each tile is 2 × 2. The elements within each tile are stored together, improving both row and column access performance. The result is better memory locality. The system can access adjacent elements in both rows and columns more quickly.
Choosing the Tile Size
Another important factor is choosing the appropriate tile size. The size of the tiles should match the size of the memory unit on the machine.
For example, if the system has a cache line size of 128 bytes and each data element is 2 bytes (16-bit), then a tile of size 8 × 8 fits perfectly into a cache line.
However, for systems using 32-bit floating-point numbers (4 bytes), the ideal tile size might be 6 × 6 or 5 × 5, depending on the architecture.
One-Level Tiling for 2D Arrays
Let us now consider how to implement one-level tiling for a 2D array. In this case, the array is divided into square tiles, and each tile is stored contiguously in memory.
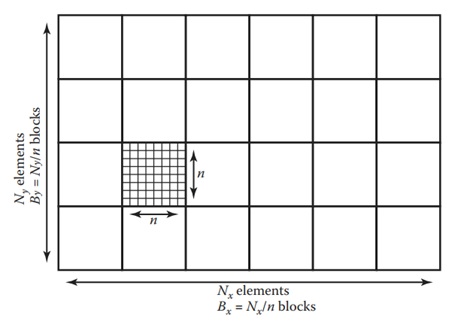
Breaking Down the Array into Tiles
Assume we have an array of size Nx × Ny, and we want to decompose it into tiles of size n × n. The number of tiles required in each dimension is given by:
$$\mathrm{B_x \:=\: \frac{N_x}{n}}$$
$$\mathrm{B_y \:=\: \frac{N_y}{n}}$$
Where Bx and By are the number of tiles in the x and y dimensions, respectively.
Indexing in a Tiled Array
To access an element (x, y) in the tiled array, we first need to determine which tile contains the element and then compute the position of the element within the tile.
The tile indices are given by −
$$\mathrm{b_x \:=\: \frac{x}{n}}$$
$$\mathrm{b_y \:=\: \frac{y}{n}}$$
Here, ÷ represents integer division. The offsets within the tile are −
$$\mathrm{x' \:=\: x \mod n}$$
$$\mathrm{y' \:=\: y \mod n}$$
Finally, the 1D index of the element in the tiled array is computed as −
$$\mathrm{\text{Index} \:=\: n^2\: \times \:(B_x \: \times\: b_y \:+\: b_x) \:+\: (y'\: \times\: n \:+\: x')}$$
This formula states that each element is accessed efficiently within its tile. The system can quickly calculate the tile and the position within the tile, leading to improved memory locality and performance.
Two-Level Tiling for 3D Arrays
For larger datasets, such as 3D arrays, two-level tiling can be used to further optimize memory usage. In this case, the array is divided into macrobricks, and each macrobrick contains multiple smaller tiles (or bricks).
Example of Two-Level Tiling
Consider a 3D array with dimensions 40 × 20 × 19. We can decompose this array into macrobricks of size 2 × 2 × 2, where each macrobrick contains bricks of size 5 × 5 × 5. This results in a hierarchical tiling structure that optimizes memory access in all three dimensions.
Indexing in a Two-Level Tiled Array
The indexing for a two-level tiled array is more complex but follows the same principles as one-level tiling. The array is first divided into macrobricks, and each macrobrick is then further divided into smaller bricks.
The formula for accessing an element (x, y, z) in a two-level tiled array is −
$$\mathrm{\text{Index} \:=\: F_x(x) \:+\: F_y(y) \:+\: F_z(z)}$$
Where Fx(x), Fy(y), and Fz(z) are the functions that compute the index of the element based on its position in the X, Y, and Z dimensions, respectively. These functions take into account both the macrobrick and brick sizes. It is ensuring efficient access to the element in memory.
Conclusion
In this chapter, we covered the concept of tiling multidimensional arrays in computer graphics. We highlighted the traditional memory layout for 2D arrays and the problems it can cause with memory locality. We then introduced the concept of tiling and explained how it improves memory access by storing adjacent data elements together.
We also covered the process of one-level tiling for 2D arrays, including how to index elements within a tiled array. Finally, we looked at two-level tiling for 3D arrays.