- Computer Graphics - Home
- Computer Graphics Basics
- Computer Graphics Applications
- Graphics APIs and Pipelines
- Computer Graphics Maths
- Sets and Mapping
- Solving Quadratic Equations
- Computer Graphics Trigonometry
- Computer Graphics Vectors
- Linear Interpolation
- Computer Graphics Devices
- Cathode Ray Tube
- Raster Scan Display
- Random Scan Device
- Phosphorescence Color CRT
- Flat Panel Displays
- 3D Viewing Devices
- Images Pixels and Geometry
- Color Models
- Line Generation
- Line Generation Algorithm
- DDA Algorithm
- Bresenham's Line Generation Algorithm
- Mid-point Line Generation Algorithm
- Circle Generation
- Circle Generation Algorithm
- Bresenham's Circle Generation Algorithm
- Mid-point Circle Generation Algorithm
- Ellipse Generation Algorithm
- Polygon Filling
- Polygon Filling Algorithm
- Scan Line Algorithm
- Flood Filling Algorithm
- Boundary Fill Algorithm
- 4 and 8 Connected Polygon
- Inside Outside Test
- 2D Transformation
- 2D Transformation
- Transformation Between Coordinate System
- Affine Transformation
- Raster Methods Transformation
- 2D Viewing
- Viewing Pipeline and Reference Frame
- Window Viewport Coordinate Transformation
- Viewing & Clipping
- Point Clipping Algorithm
- Cohen-Sutherland Line Clipping
- Cyrus-Beck Line Clipping Algorithm
- Polygon Clipping Sutherland–Hodgman Algorithm
- Text Clipping
- Clipping Techniques
- Bitmap Graphics
- 3D Viewing Transformation
- 3D Computer Graphics
- Parallel Projection
- Orthographic Projection
- Oblique Projection
- Perspective Projection
- 3D Transformation
- Rotation with Quaternions
- Modelling and Coordinate Systems
- Back-face Culling
- Lighting in 3D Graphics
- Shadowing in 3D Graphics
- 3D Object Representation
- Represnting Polygons
- Computer Graphics Surfaces
- Visible Surface Detection
- 3D Objects Representation
- Computer Graphics Curves
- Computer Graphics Curves
- Types of Curves
- Bezier Curves and Surfaces
- B-Spline Curves and Surfaces
- Data Structures For Graphics
- Triangle Meshes
- Scene Graphs
- Spatial Data Structure
- Binary Space Partitioning
- Tiling Multidimensional Arrays
- Color Theory
- Colorimetry
- Chromatic Adaptation
- Color Appearance
- Antialiasing
- Ray Tracing
- Ray Tracing Algorithm
- Perspective Ray Tracing
- Computing Viewing Rays
- Ray-Object Intersection
- Shading in Ray Tracing
- Transparency and Refraction
- Constructive Solid Geometry
- Texture Mapping
- Texture Values
- Texture Coordinate Function
- Antialiasing Texture Lookups
- Procedural 3D Textures
- Reflection Models
- Real-World Materials
- Implementing Reflection Models
- Specular Reflection Models
- Smooth-Layered Model
- Rough-Layered Model
- Surface Shading
- Diffuse Shading
- Phong Shading
- Artistic Shading
- Computer Animation
- Computer Animation
- Keyframe Animation
- Morphing Animation
- Motion Path Animation
- Deformation Animation
- Character Animation
- Physics-Based Animation
- Procedural Animation Techniques
- Computer Graphics Fractals
Spatial Data Structure in Computer Graphics
Spatial data structures are used for geometric objects in space to optimize the efficiency of various operations such as ray tracing, collision detection, and view culling. These structures help manage large scenes and complex objects in 3D space and also ensure specific objects can be found or accessed quickly.
In this chapter, we will explore spatial data structures, focusing on three main types: The bounding volume hierarchies. Also the uniform spatial subdivision, and binary space partitioning.
What are Spatial Data Structures?
In many graphics applications, especially where large or complex scenes are present, we need to quickly locate and access the geometric objects. For instance, in ray tracing, we need to check which objects intersect with a ray. In games and simulations, detecting collisions between objects is critical. Without a proper system, these operations would be time-consuming and inefficient, especially as the number of objects grows.
Spatial data structures address this problem by organizing objects in a way that allows for faster searching. Instead of checking all object one by one, spatial data structures allow the scene to be broken down into manageable sections or volumes. These are significantly reducing the number of comparisons needed.
There are several types of spatial data structures, each suited to different tasks and object types. The main types we will discuss are Bounding Volume Hierarchies, Uniform Spatial Subdivision, and Binary Space Partitioning.
Bounding Volume Hierarchies
A Bounding Volume Hierarchy (BVH) is a structure where each node in the hierarchy represents a bounding volume that encloses one or more objects. The bounding volumes themselves are typically simple shapes, like axis-aligned boxes, spheres, or cylinders, etc, that are easy to test for intersections with rays or other objects.
Working of Bounding Volume Hierarchies
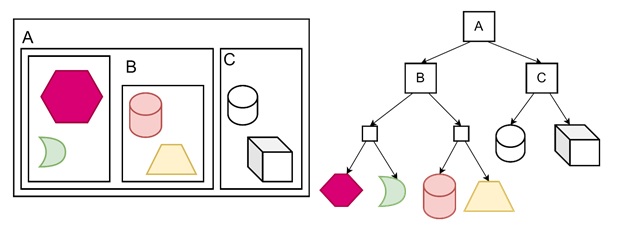
The idea behind a BVH is to organize objects into a tree structure. The root of the tree is a bounding volume that contains all objects in the scene. Each child node contains a smaller subset of objects, and each node further down the tree contains progressively fewer objects until the leaves of the tree contain individual objects.
When a ray needs to be checked for intersections, it is first tested against the bounding volume at the root of the tree. If the ray does not intersect the bounding volume, there is no need to check any of the objects it contains. If the ray does intersect the volume, the ray is then checked against the child volumes. This process continues until the ray is either found to intersect a specific object or it passes through the entire hierarchy without hitting anything.
Example of a Bounding Volume Hierarchies
Consider the following figure, here a set of objects placed in a scene. We can first create a large bounding box that contains all the objects. Inside this box, we divide the objects into two groups and create two smaller bounding boxes around each group. This process is repeated, creating a hierarchy of bounding volumes.
Uniform Spatial Subdivision
Another type of data structure is the Uniform Spatial Subdivision. It divides space into a grid of equally sized cells. Each cell contains a list of the objects that are present within its boundaries. Rays or other objects moving through the scene are checked only against the objects in the cells they pass through.
Working of Uniform Spatial Subdivision
In this method, the entire scene is partitioned into small, uniform cells, which can be thought of as a 3D grid. Each object in the scene is assigned to one or more cells, depending on its size and position. When a ray or another object traverses the scene, it moves from one cell to another, checking only the objects in the current cell for intersections.
This approach is highly efficient for scenes with a regular distribution of objects. If the objects are evenly distributed across the cells, this method ensures that only a small number of objects need to be checked at any given time, speeding up operations like ray tracing or collision detection.
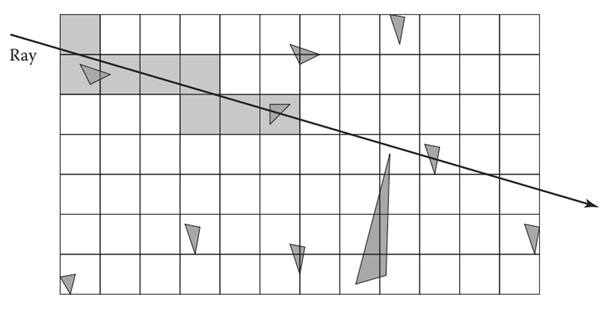
For example, in a large scene with hundreds of objects, the ray would only interact with a few objects in each cell, rather than testing against all objects in the scene. This makes the process faster and more efficient.
Binary Space Partitioning
Next data structure is the binary space partitioning (BSP). It is a method that recursively divides space into two halves using cutting planes. These planes are typically aligned with one of the coordinate axes (x, y, or z), and they split the space into two regions. The objects in the scene are assigned to one of the two regions based on their position relative to the cutting plane.
Working of Binary Space Partitioning
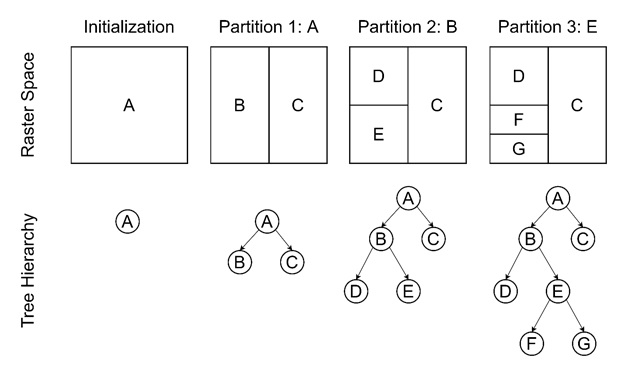
A BSP tree is built by recursively dividing the space. Each node in the tree represents a cutting plane and two child nodes representing the left and right subspaces. Objects that intersect the cutting plane may appear in both child nodes. The process continues until each node contains only a small number of objects or no objects at all.
Example of Binary Space Partitioning
Consider a scene where we have divided space into two regions using a cutting plane A to BC. Objects. Now split B into DE vertically, then E to FG. Corresponding tree is being generated as shown in the following figure.
Comparison of Spatial Data Structures
Each of the spatial data structures we have discussed has its strengths and weaknesses, making them suitable for different types of scenes and operations −
- Bounding Volume Hierarchies are well-suited for scenes where objects are clustered in specific regions, as they allow for large sections of the scene to be ignored during ray tracing or other operations.
- Uniform Spatial Subdivision works best when objects are evenly distributed across the scene, as the regular grid structure ensures that only a few objects need to be checked in each cell.
- Binary Space Partitioning is particularly effective in scenes with complex geometry, as it allows space to be divided recursively, reducing the number of objects that need to be checked at each step.
Conclusion
In this chapter, we explained the concept of spatial data structures in computer graphics. We focused on three main types: Bounding Volume Hierarchies, Uniform Spatial Subdivision, and Binary Space Partitioning. These structures help improve the efficiency of operations such as ray tracing, collision detection, and view culling by organizing objects in space.